- 分布式缓存读书笔记系列之一
- 从缓存的基本概念以及淘汰算法简单介绍入手
- 介绍优秀缓存框架的实现(本地缓存和集中式缓存)
缓存基本概念
缓存分类(软件系统中分类)
- 根据所处位置的不同划分为:
- 客户端缓存: BS 应用中页面的缓存(LocalStorage)和浏览器缓存,移动应用中APP自身所使用的缓存
- 服务端缓存:
- 数据库缓存:例如Mysql 查询缓存:当开启了 Mysql 的 Query Cache,会针对查询的结果 ResultSet 进行缓存,当接收新的查询语句时,判断是否满足Qurey Cache要求,根据预先设定好的 Hash 算法将查询豫军进行 HASH,对应地作为键去查询缓存中的数据。
- 平台级缓存:一般指带有缓存特性的应用框架,例如 Ehcache, JBoss Cache等
- 应用级缓存:
- 面向 Redis 的缓存应用
- 多级缓存:Nginx 应用服务器的本地缓存解决了热点数据的缓存问题,Redis分布式缓存集群减少了访问回源率,Tomcat集群使用的平台级缓存防止了相关缓存失效/崩溃之后的冲击,数据库缓存提升数据库查询时的效率。
- 公有云提供的缓存服务:动态扩容,数据多备,自动容灾,成本较低。
- 网路中的缓存:Web缓存(正向代理)-- Squid ,边缘缓存(反向代理)-- Varnish, SDN
- 根据规模和部署方式可划分为:
- 单体缓存
- 缓存集群
- 分布式缓存
缓存算法(替代策略)
LRU - Least Recently Used
- 最近最少使用
- 在CPU缓存淘汰和虚拟内存系统中使用的效果很好,浏览器缓存一般也使用了该算法。
- 如下所示例子。B 和 A 都在淘汰进程之前使用过,更新最新的使用时间。 C 则一直没有被使用,虽然不是最久的数据,但是根据 LRU,它需要被淘汰。
- 最近最少使用页面置换算法,也就是首先淘汰最长时间未被使用的页面。
- 关键是看页面最后一次被使用到发生调度的时间长短。
- 优点:
- 热点缓存将被持久命中
- 缺点:
- 当所有缓存数据都变成热点后,将失去 LRU 的优点.
LFU - Least Frequently Used
- 最近最不常用
- 替换访问次数最少的缓存。针对某些一开始可能有很高的使用频率但之后再也不会使用的场景,容易导致缓存污染。
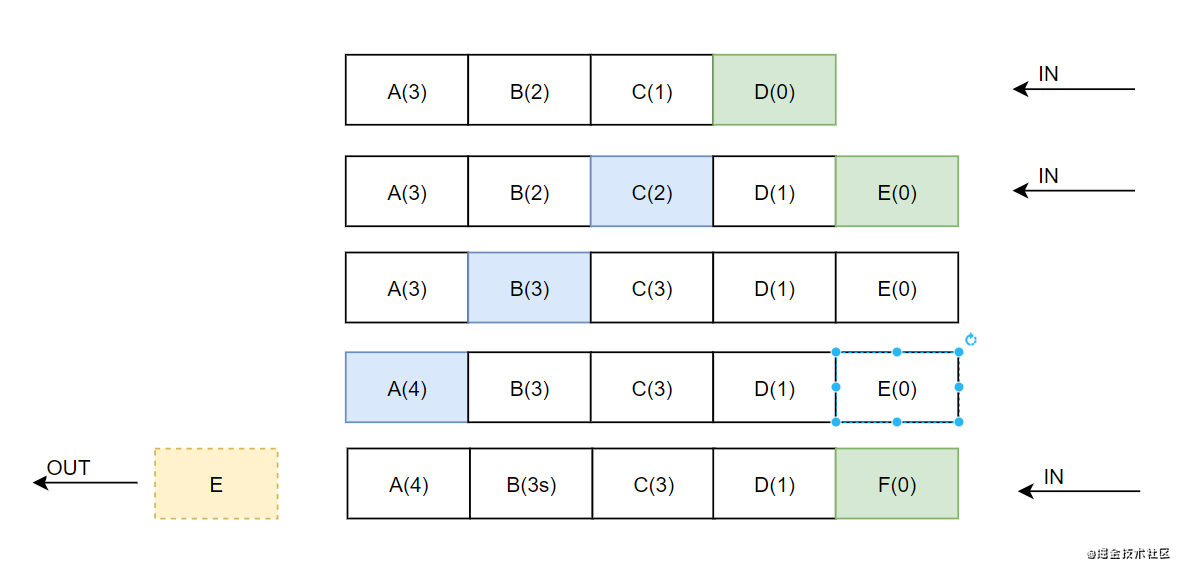
- 如下所示例子,每当缓存被使用的时候( C B A),则将使用频率加 1,当进行淘汰进程的时候,将使用频率最低的数据淘汰( E )。
- 优点:
- 提高频繁使用的数据的命中效率
- 缺点:
- 当所有数据都很频繁访问的时候,将失去优点
- 单纯的 LFU 会有个问题会导致缓存失效,当最新加入的 E 在 F 进来之前,没有被访问过,那么它将被淘汰。还没有给 E 被访问的机会,E 就被淘汰了。所以我们可以在 E 进来的时候,设置一个中位数的访问频率,保证新数据不会被马上被淘汰
LRU2 - Least Recently Used 2
- LRU的一个变种,把被两次访问过的对象放入缓存池,缓存池满后对应的清除两次最少使用的缓存对象去除。因为需要跟踪对象2次,访问负载会随着缓存池的增加而增加。同理 LRU-K
LRU-K
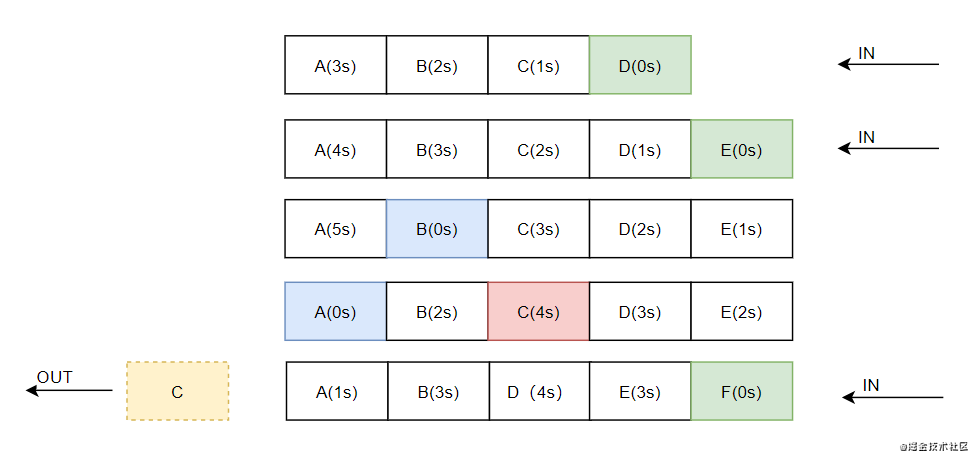
- 相比LRU,LRU-K需要多维护一个队列,用于记录所有缓存数据被访问的历史。只有当数据的访问次数达到K次的时候,才将数据放入缓存。当需要淘汰数据时,LRU-K会淘汰第K次访问时间距当前时间最大的数据。详细实现如下
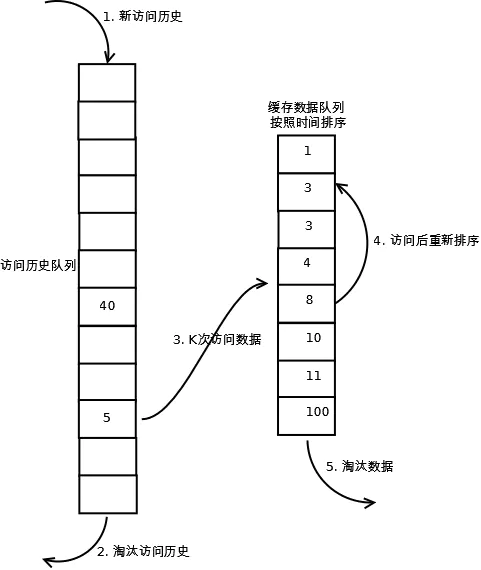
- (1). 数据第一次被访问,加入到访问历史列表;
- (2). 如果数据在访问历史列表里后没有达到K次访问,则按照一定规则(FIFO,LRU)淘汰;
- (3). 当访问历史队列中的数据访问次数达到K次后,将数据索引从历史队列删除,将数据移到缓存队列中,并缓存此数据,缓存队列重新按照时间排序;
- (4). 缓存数据队列中被再次访问后,重新排序;
- (5). 需要淘汰数据时,淘汰缓存队列中排在末尾的数据,即:淘汰“倒数第K次访问离现在最久”的数据。
- LRU-K具有LRU的优点,同时能够避免LRU的缺点,实际应用中LRU-2是综合各种因素后最优的选择,LRU-3或者更大的K值命中率会高,但适应性差,需要大量的数据访问才能将历史访问记录清除掉
2Q - Two Queue
- LRU的另一个变种。把被访问的数据放在LRU的缓存中,如果这个对象再一次被访问,就把他转移到第二个更大的LRU缓存中,使用了多级缓存的方式。去除缓存对象是为了保持第一个缓存池是第二个缓存池的1/3,当缓存的访问负载是固定的时候,把 LRU换成LRU2,就比增加缓存的容量更好。
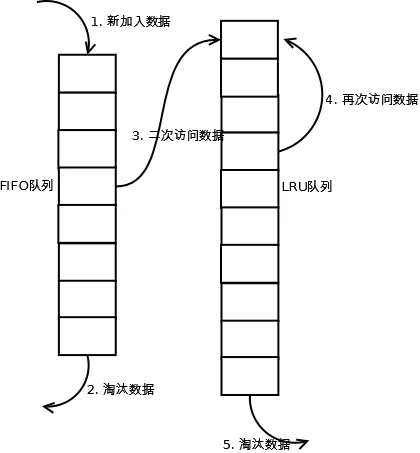
- (1). 新访问的数据插入到FIFO队列;
- (2). 如果数据在FIFO队列中一直没有被再次访问,则最终按照FIFO规则淘汰;
- (3). 如果数据在FIFO队列中被再次访问,则将数据移到LRU队列头部;
- (4). 如果数据在LRU队列再次被访问,则将数据移到LRU队列头部;
- (5). LRU队列淘汰末尾的数据。
SIZE
- 替换占用空间最大的对象,但针对部分进入缓存的小对象,之后可能永远不再被访问,SIZE策略没有提供淘汰这类对象的机制,也会导致“缓存污染”。
LRU-Threshold
- 不缓存超过某一size的对象,其他与LRU相同
Log(Size)+LRU
- 替换 size 最大的对象,当 size 相同时,按照LRU进行替换。
Hyper-G
- LFU 的改进版,同时考虑上次访问的时间和对象size。
Pitkow/Recker
- 替换最近最少使用的对象,除非所有对象都是今天访问过的,如果是这样,则替换掉最大的对象。
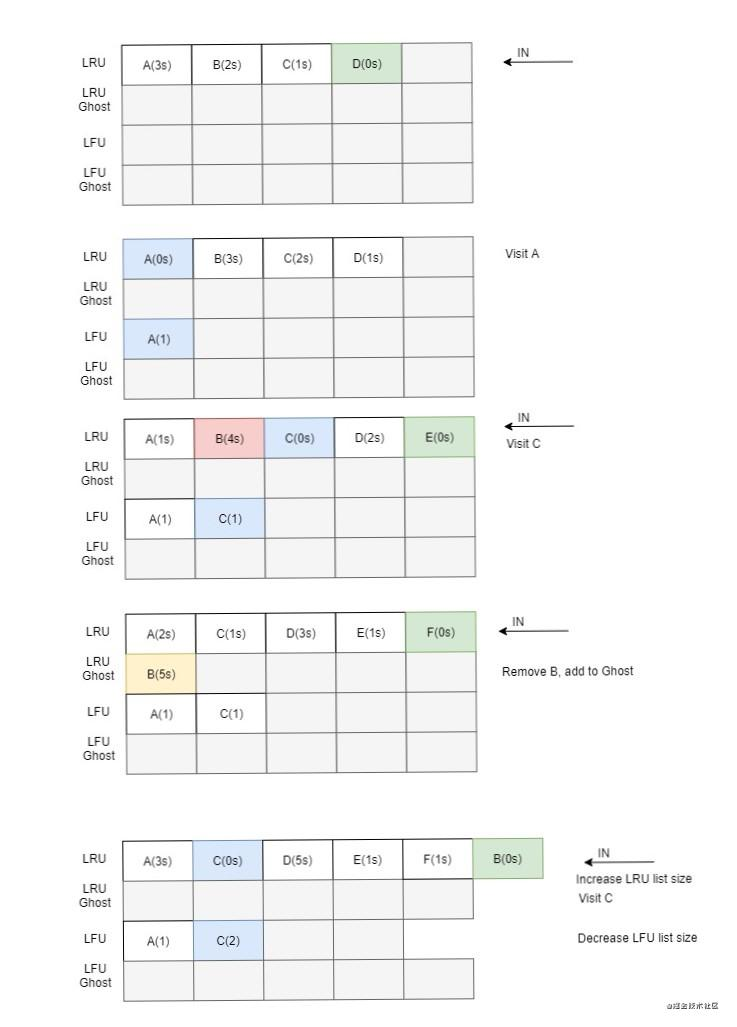
ARC - Adaptive Replacement Cache
- [FAST'03] ARC: A Self-Tuning, Low Overhead Replacement Cache
- 自适应缓存替换
- ARC 的精髓就是根据被淘汰数据的访问情况,而增加对应 LRU 还是 LFU 链表的大小。
- ARC 包含了四个链表。 LRU 和 LRU Ghost , LFU 和 LFU Ghost, Ghost 链表为对应淘汰的数据记录链表,不记录数据,只记录 ID 等信息。
- 当数据 A 加入 LRU 后,如果 A 再次被访问,则同时被放到 LFU 链表中。所以 LFU 链表的缓存为 LRU 链表的多次访问的数据。
- 当 LRU 链表淘汰了 B,那么 B 的信息则进入到 LRU Ghost 链表。如果 B 在之后再次被访问,则增加 LRU 链表的大小,同时缩减 LFU 链表的大小。LFU 链表同理。
- 所以,这是一个根据最近未使用和最少频率使用动态调整的算法。
- 优点:
- 根据内存使用方式动态调整 LRU 和 LFU 的大小,以适应当前最佳的缓存命中。
- 缺点:
- 占用更多的内存空间
MRU - Most Recently Used
- MRU 与 LRU 是相对的,移除最近最多被使用的对象,针对某些场景,找到最近最少使用的对象是一项时间复杂度较高的任务,此时考虑 MRU。在数据库内存缓存中比较常见。
FIFO - First In First Out
- 队列先进先出。
Random Cache
- 随机缓存就是随意地替换缓存数据,比FIFO机制好,某些特殊情况下甚至优于LRU
LIRS
- LIRS 算法全称 Low Inter-reference Recency Set,LIRS 使用 IRR(Inter-Reference Recency)来表示记录数据块访问历史信息,IRR 表示最近连续访问同一个数据块之间访问其他不同数据块非重复个数:
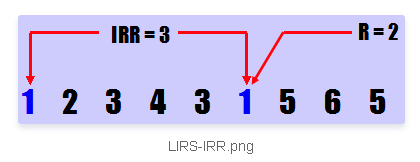
- Cache1 的 IRR=3,连续两次访问 Cache1 之间访问 2,3,4,3 虽然访问两次但这里只算一次。同时,一个数据块从上一次访问到当前时间访问其他不同数据块非重复个数称为这个数据块的 recency,如图 Cache1 的 R=2,LIRS 与 LRU 最大的不同就是在淘汰 Cache 时候不仅考虑 Recency,同时会将 IRR 纳入考量范围中。LIRS 动态维护两个集合:
- LIR(low IRR block set)具有较小 IRR 的数据块集合,可以将这部分数据块理解为热数据,因为 IRR 低说明访问的频次高
- HIR(high IRR block set)具有较高 IRR 的数据块集合,可以将这部分数据块理解为冷数据。同时,在 HIR 集合中有部分数据块不在缓存中,但我们记录了它们的历史信息并标记为未驻留在缓存中,我们称这部分数据块为 nonresident-HIR,另外一部分驻留在缓存中的数据块称为 resident-HIR。
- LIRS 会限制 LIR 集合大小,保证所有的 LIR 数据块在缓存中,当发生缓存块淘汰时候,只会淘汰 HIR 集合中的数据块,这里用变量 表示 LIR 集合大小, 表示 HIR 集合中驻留在内存的数据块(resident-HIR)大小,用 L 表示驻留在缓存中的数据块总数:
- 因为 LIR 集合在缓存中,所以访问 LIR 集合的数据块是百分百命中缓存的,而 HIR 集合分为 resident-HIR 和 nonresident-HIR 两部分,所以会遇到未命中情况。当发生缓存未命中需要置换缓存块时候,会选择优先淘汰置换 resident-HIR。如果 HIR 集合的数据块 IRR 经过更新比 LIR 集合中的小,那么 LIR 集合数据块就会被 HIR 集合中 IRR 小的数据块挤出并转换为 HIR。
- https://blog.csdn.net/z69183787/article/details/105534151/?utm_medium=distribute.pc_relevant.none-task-blog-baidujs_baidulandingword-1&spm=1001.2101.3001.4242
DLIRS
LIRS2
缓存的原理
缓存的规范
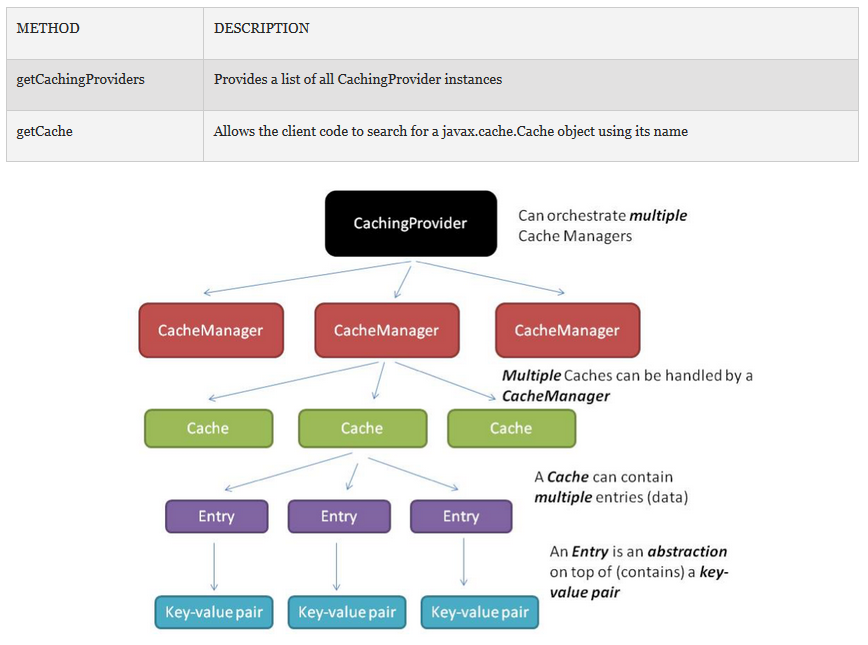
- 以 JSR (Java Specification Requests) 为例,该规范主要定义了一种对 Java 对象临时在内存中的进行缓存的方法,包括对象的创建、访问、失效、一致性等。
- javax.cache 包中有一个 CacheManager 接口负责保存和控制一系列的缓存。主要包括以下特性:
- 缓存的读写;
- 缓存具有原子性操作;
- 具有缓存时间监听器;
- 具有缓存注解;
- 保存缓存的KV对类型应该为泛型。
JCache API
- 核心类
- CacheProvider:创建、配置、管理 CacheManager
- CacheManager:创建、配置、管理 Cache
- Cache:类似 Map. 存储以 Key 为索引的值
- Entry:存储在 Cache 中的 kev-value 对
CachingProvider cachingProvider = Caching. getCachingProvider();
CacheManager cacheManager = cachingProvider. getCacheManager();
MutableConfiguration<String, String> config = new MutableConfiguration();
Cache<String, String> cache = cacheManager. createCache("JDKCodeNames",config);
cache.put("JDK1.5","Tiger");
cache.put("JDK1.6","Mustang");
cache.put("JDK1.7","Dolphin");
String jdk7CodeName = cache.get("JDK1.7");
- JCache 的配置: JCache API提供了一组标准的接口和实现,通过它们可以以编程方式配置缓存。javax.cache.configuration.MutableConfiguration及其构建器类API有助于配置。可以配置以下高速缓存特性:
| METHOD | JCACHE CONFIGURATION ARTIFACT |
|---|---|
| setTypes | Data types to be stored in the Cache |
| setStoreByValue | Store by reference or value |
| setExpiryPolicyFactory | Expiration Policy |
| setReadThrough, setWriteThrough | Read through and Write through policies |
| setCacheLoaderFactory, setCacheWriterFactory | Loader and Writer implementation |
| addCacheEntryListenerConfiguration | Entry Listener implementation |
| setManagementEnabled, setStatisticsEnabled | Management and statistics activation |
- Store-By-Value & Store-By-Reference
- Value:存储 KV 对时,会将值拷贝一份存入缓存(复制一份),避免外界修改KV时,污染了缓存中的KV对内容;
- Reference:存储 KV 对时,直接将引用存入缓存。Java常见的堆内缓存,一般使用该方式,从而提升缓存性能(免去了复制以及回收时的开销)
- 缓存过期策略:这些策略都对应地实现了
ExpirePolicy<K, V>接口
public interface ExpiryPolicy<K, V> {
Duration getExpiryForCreacedBntry(Entry<? extends K, ? extends V>entry);
Duration getExpiryForAccessedEntry(Entry<? extends K, ? extends V>entry);
Duration getExpiryForKodifiedEntry(Entry<? extends K, ? extends V>entry);
}
| EXPIRATION POLICY IMPLEMENTATION CLASS | DESCRIPTION |
|---|---|
| AccessedExpiryPolicy | Based on time of last access |
| CreatedExpiryPolicy | Based on creation time |
| EternalExpiryPolicy | Ensures the cache entries never expire (default expiry policy) |
| ModifiedExpiryPolicy | Based on time of last update |
| TouchedExpiryPolicy | Based on time of last access OR update |
MutableConfiguration<String,String> config = new MutableConfiguration();
config.setExpiryPolicyFactory(CreatedExpiryPolicy.factoryOf(Duration.ONE_MINUTE));
参考链接
缓存框架的实现
- CsCache 源码基于SPI实现并定义了JCache的缓存规范。
- 参考博客:《深入分布式缓存》之“自己动手写缓存”
Ehcache 和 Guava Cache
Ehcache
主要特点
- 快速、简单:对应的线程机制是为大型高并发系统设计的,同时提供了易于使用的 API. 被广泛用于了 Hibernate、Spring、Cocoon等其他开源系统。
- 多种缓存策略:LRU/LFU/FIFO
- 缓存数据有两级:内存和磁盘
- 虚拟机重启过程中缓存数据写入到磁盘:引入了缓存数据持久化存储,可以显示调用将缓存数据刷入磁盘。
- 可以通过 RMI 和可插入 API等方式进行分布式缓存:Terracotta 缓存集群;RMI、JGroups/JMS 冗余缓存数据。
- 提供相关监听器接口:可以监听缓存事件和缓存管理器。
- 提供 Hibernate 的缓存实现
具体使用
- 关于 EhCache 的一些具体使用,可以参考相关博客和官方示例文档,此处不赘述。
参考链接
Ehcache 集群
- Ehcache 支持多种集群方案,分别是 Terracotta、RMI、JMS、JGroup、Ehcache Server
RMI 组播方式
- RMI 是 Java 的一种远程方法调用技术,是一种点对点的基于 Java 对象的通讯方式。
- 采用 RMI 集群模式时,集群中的每个节点都是对等关系,并不存在主节点或者从节点的概念,因此节点间必须有一个机制能够互相认识对方,必须知道其它节点的信息,包括主机地址、端口号等。EhCache 提供两种节点的发现方式:手工配置和自动发现。
- 手工配置:要求在每个节点中配置其它所有节点的连接信息,一旦集群中的节点发生变化时,需要对缓存进行重新配置。
- 自动发现:使用 TCP 广播来建立和包含一个广播组,它的特征是最小配置和对成员组的自动添加和管理。没有那个服务器是有优先级的。对等点每一秒中向广播组发送心跳,如果一个对等点在五秒钟内没发送过来,则此对等点将会被删除,如果有新的,则会被加入集群。
- 缓存改变时,Ehcache 会向组播 IP 地址和端口号发送 RMI UDP 组播包。
JMS 消息方式
- JMS 是两个应用程序之间进行异步通信的 API,它为标准消息协议和消息服务提供了一组通用接口,包括创建、发送和读取消息等,同时也支持基于事件的通信机制,通过发布事件机制向所有与服务器保持连接的客户端发送消息,再发送消息的时候,接收者不需要在线,等到客户端上线的时候,能保证接收到服务端发送的消息。
- JMS 核心就是一个消息队列,每个应用节点都订阅预先定义好的主题,同时,节点有元素更新时,也会发布更新元素到主题中去。各个应用服务器节点通过侦听MQ获取到最新的数据,然后分别更新自己的Ehcache缓存,Ehcache默认支持ActiveMQ,我们也可以通过自定义组件的方式实现类似Kafka,RabbitMQ。
Cache Server 模式
- Ehcache Server 集中存放缓存数据,Server 之间进行数据复制,提供了强大的安全机制和监控功能,以 WAR 包的形式进行部署,提供 RESTful 和 SOAP 类型的 API。
参考链接
Ehcache 适用场景
- 比较少的更新数据表的情况下。(针对Hibernate) EhCache 作为 Hibernate 缓存时。在进行修改表数据的时候,会自动把缓存中关于此表的缓存全部删除掉,为了保证数据的一致性,但性能较差。
- 对并发要求不是很严格的情况下。多台应用服务器中的数据无法进行实时同步。
- 对一致性要求不高的情况下。因为 EhCache 本地缓存的特性,目前无法很好解决不同服务器之间的缓存同步的问题,在一致性要求高的情况下,建议使用 Redis、Memcached 等集中式缓存。
Ehcache 的瓶颈
- 缓存漂移:每个应用节点只管理自己的缓存,在更新某个节点的时候,不会影响到其他节点,不能较好地进行数据之间的同步。
- 对数据库要求高:集群环境中,每一个应用数据为了保持最新,会增大相应的数据库开销。
实际应用
减小缓存击穿的风险
- 可以使用 EhCache 作为集中式缓存的二级缓存,利用服务器本地的应用缓存在集中式缓存宕机以后承担相应的负载。
- 但与此同时也相应地引入了 本地缓存 Ehcache 的更新问题以及集群环境下的同步问题
- 定时轮询:每台应用服务器定时轮询集中式缓存,比较缓存数据和本地缓存的版本号,如果不一致,对应地进行本地缓存的同步更新。
- 仍然会有数据一致性的问题。每台服务器定是轮询的时间点可能不一样,可能造成缓存数据不一致的问题,故只适用于对一致性要求不高的场景下。
- 主动通知:引入消息队列,每台应用服务器的本地缓存侦听 MQ 消息,通过 MQ 推送或者拉取的方式,一定程度上保证数据的同步更新。
- 不同服务器之间的网络速度的不同仍然可能保证达到完全强一致性,基于此原理使用 ZooKeeper 等分布式协调通知组件也是如此。
- 定时轮询:每台应用服务器定时轮询集中式缓存,比较缓存数据和本地缓存的版本号,如果不一致,对应地进行本地缓存的同步更新。
Guava Cache
使用场景
- 愿意消耗一些本地内存空间来提升速度
- 更新锁定:针对缓存不命中的情况,并发量较大的话,可能出现多个请求同时从数据源中请求相同的数据。而Guava Cache 可以在 CacheLoader 的 load 方法中加以控制,针对同一个 Key,只让一个请求去数据源中读取数据,而其他请求阻塞等待结果。同时也支持 refreshAfterWrite 定时刷新数据的配置项,刷新时其他请求会阻塞在一个固定的时间段,如果这段时间内没有获得新值,就直接返回旧值。
具体使用
- 可参考相关博客例子。
- Guava 实现原理也可参考相关博客
参考链接
- [1] Segmentfault : Guava Cache用法介绍
- [2] CSDN : Guava Cache 使用学习
- [3] crossoverjie : Guava 源码分析(Cache 原理)
- [4] crossoverjie : Guava 源码分析(Cache 原理【二阶段】)
- [5] GIthub WIKI : Guava CachesExplained
淘汰策略
被动删除
- 基于数据的大小进行删除:当容量即将达到(接近)指定的大小(最大条数)的时候,删除不常用的键值对
- 基于过期时间进行删除:
expireAfterAccess(long, TimeUnit):当某个 Key 最后一次访问后,再隔多长时间后删除;expireAfterWrite(long, TimeUnit):当某个 Key 被创建后,隔多长时间后被删除。
- 基于引用的删除:基于 Java 的垃圾回收机制,判断缓存的数据引用的关系,如果没有被引用,则 Guava 会将该数据删除
主动删除
Cache.invalidate(key):单独删除某一个 Key 对应的缓存Cache.invalidate(keys):批量删除一批 Key 对应的缓存Cache.invalidateAll():删除所有的数据
集中式缓存 Memcached
特性
- 协议简单:服务端和客户端通信不使用复杂的XML等格式,而是使用简单的基于文本协议或者二进制协议。
- 基于 libevent 的事件处理:由于 epoll, kqueue, /dev/poll 每个接口都有自己的特点,程序移植困难,故应运而生了将 Linux 的 epoll、BSD 类操作系统的 kqueue 等事件处理功能封装成统一的接口的库 libevent. 故在 Linux、BSD、Solaris 等操作系统上能发挥其高性能。
- 内置内存存储方式:数据均保存在内置的内存存储空间中从而提高性能,故掉电或者重启之后数据会全部丢失。另外内存达到指定的值后,会自动删除不使用的内存,采用 LRU 算法。
- 通过客户端实现分布式:服务器实例之间不会通信共享信息,在客户端会实现一些路由选择算法来决定具体定向到哪台 Memcached 缓存服务器,分布式的能力实在客户端代码实现的。
问题
- 无法备份,重启无法恢复:通过第三方的方案来进行持久化,需要兼容 Memcached。如 MemcachedDB 以及 Tokyo Cabinet (DBM 数据库)和 Tokyo Tyrant (网络协议)配合使用。
- 不支持高级查询:由于存储机制,不支持范围查询
- 单点故障 failover:可以通过主从模式解决。应用服务器通过客户端hash,对缓存服务器的主节点和子节点进行双写,同时更新;读取的时候,先读取主节点数据,若返回为空或者无法取得数据的s时候,访问子节点。针对可能存在的一致性问题,统一以Master为准。在进行缓存数据的更新操作的时候,先获取Master中的数据,再对应地进行CAS更新,更新成功后对应地再更新子节点。如果CAS多次后都失败,则对Master和Slave进行删除操作,后续让请求穿透缓存,从数据库中获取数据,再写回缓存。
内存存储
Slab-Allocation 机制
- 传统的内存分配机制为通过对所有记录简单地进行 malloc 和 free 来进行,但该方式会产生内存碎片,加重操作系统内存管理器的负担。
- Slab-Allocation 机制则是按照预先规定的大小,将分配的内存分割成各种尺寸的块(chunk),并把尺寸相同的块分成组 Slab Class(chunk 的集合)。分配的块可以重复利用,不释放到内存中。
核心概念
- Page:分配给 Slab 的内存空间,默认 1MB。
- Chunk:用于缓存记录的内存空间。
- Slab Class:特定大小的 chunk 的组。
- Chunk 大小之间的关系由 growth factor 决定。如 88bytes * 1.25 = 112 bytes; 112 bytes * 1.25 = 144 bytes,依此类推。
- Slab-Allocation 的机制简单说就是,Memcached 根据收到的数据的大小,选择最合适数据大小的 Slab。Memcached 中保存着 Slab 内空闲的 Chunks 的列表,根据该列表选择 Chunk,然后将数据缓存其中。
- 该机制解决了内存碎片的问题,但同时也引入了新的问题:无法有效利用分配的内存,内存的利用率不高。如 112bytes 的 chunk 存放 100bytes 的数据。
- 可以调整 Growth Factor 来进行调优
Item
- 在内存中保存(key, value)30 秒,数据被打包成一个 Item
set key 0 30 5 value
- 一个完整的 Item 包括以下几个部分:
- key :键
- nkey:键长
- flags:用户定义的flag
- nbytes:值长,包括换行符
- suffix:后缀 Buffer
- nsuffix:后缀长
- 完整的 Item 长度是 “键长+值长+后缀长+item结构大小(32字节)”,从而计算 Slab 的 classid.
典型问题解析
- 容量问题:单一服务节点无法突破单机内存上限
- 服务高可用 HA:单实例场景下,如果因为网络波动或者机器故障等原因缓存不可用,会出现缓存击穿的情况
- 扩展问题:单一服务节点无法突破单实例请求峰值上限,比如热点问题,微博热搜,秒杀事件等。
过期机制
- Lazy Expiration:在 get 时,查看记录的时间戳,检查记录是否过期,从而实现不会在过期监视上耗费 CPU 时间。
- LRU 算法:在 Slab 的范围内执行
- LRU : 最近最少使用
- LRU-K : 最近使用过 K 次
- Two Queues : 两个缓存队列,一个是 FIFO 队列,一个是 LRU 队列
- Multi Queues : 根据访问频率将数据划分为多个队列,不同队列具有不同的优先级。
哈希算法
- Memcached 的分布式部署结构以来的核心即为 哈希算法。例如部署了三个 Memcached 实例,简单的哈希算法实现即为
hash(key) mod 3,对应地将 Key 散列化之后取模,从而落到一个具体的实例上。 - 但如上所示的简单 Hash 算法无法较好地解决实例的增加或减少的问题中去,考虑采用一致性 Hash和哈希环来解决。
热点问题
- 数据热点访问问题(读热点问题):例如某些热点商品的访问度非常高,可能造成单个 Memcached 节点的负载特别高,通用的解决思路是:在 Cache 的 Client 端做本地 LocalCache,当发现热点数据时直接缓存到客户端,而不用每次都请求到缓存服务端。
- 巨热数据的处理:Facebook 的解决办法为通过多个 key_index(key:xxx#N) 来获取热点 Key 的数据,其实质也是把 Key 分散,对于非高一致性要求的高并发读有一定的效果。解决之道:把巨热数据的 key 发布到所有的服务器上,每个服务器给对应的 key 一个别名,比如 get key:xxx => get key:xxx#N。每次对热点数据访问时对应地进行Hash,从而转换成 子Key,从而分担单个缓存服务器的压力。
缓存与数据库的更新问题
- 该问题主要是针对更新数据库数据时,对应地需要更新缓存中的数据(也可以选择淘汰缓存中的数据),从而保证数据库和缓存数据的一致性,同时要尽量保证整个过程耗时较短(根据具体的业务需求)。
参考链接
命名空间
- 如果很多不同的业务系统使用同一套 Memcached 服务,那么很有可能存在 Key 的冲突。为了对不同的业务数据进行隔离,引入命名空间的概念来进行区分。
- 由于 Memcached 本身不提供命名空间机制,故可使用 Key 的前缀来模拟命名空间。如 orderid_xxx, userid_xxx
CAS
- CAS 主要解决原子性操作问题。操作一个 Key 的过程当中,不允许被其他访问操作,如果被操作过,当前操作则失败。
- Memcached 中使用 gets 命令获取 key-value 和对应的令牌(64位版本标识符),然后产生新的 Value,最后附带版本号提交新的 Key-Value;服务端判断 CAS 操作中的版本号是不是最新的,如果不是,则认为 Key 对应的 Value 已经被修改,本次 CAS 操作失败。
参考链接
Memcached 客户端
- 客户端的功能主要包括:Memcached 协议的封装,连接池的实现, sharding 机制,故障转移,序列化等机制
- 此处以 Java Client Spymemcached 为例进行介绍。
Spymemcached 设计思想解析
特性
- 异步:NIO 作为底层通信框架
- 集群:默认支持服务器集群的 sharding 机制
- 自动恢复:网络闪断,会进行异步重连,自动恢复
- failover 机制,提供可扩展的容错机制
- 支持批量 get,本地进行数据的聚合
- 序列化:默认支持 JDK 序列化机制,可自定义扩展
- 超时机制,支持访问超时等设置
整体设计
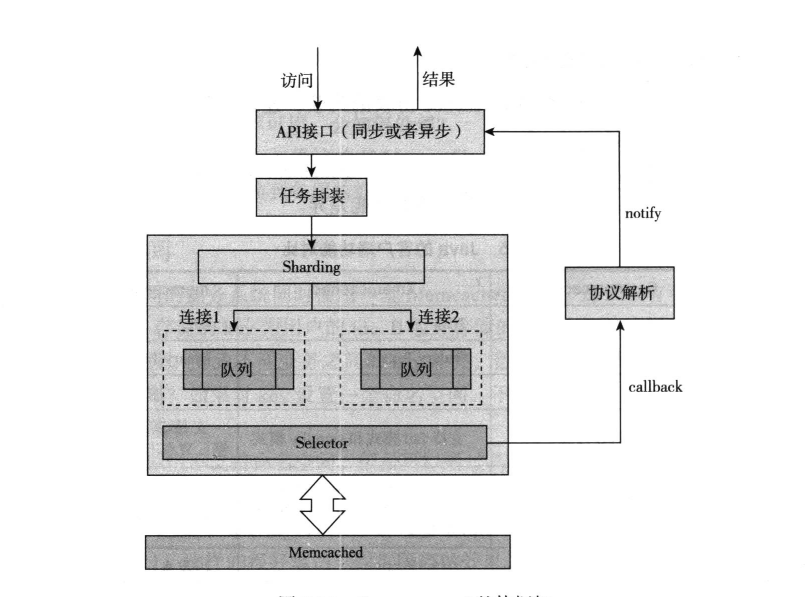
- API 接口:对外提供同步的接口和异步的接口调用。异步接口实际返回 Future
- 任务封装:将访问操作和 callback 封装为 Task
- 路由机制:通过默认的 Sharding 策略(支持 arrayMod 和 Ketama),选择 Key 对应的连接。
- 将 Task 放到对应连接的队列
- Selector 线程异步获取连接队列的 Task,进行协议的封装和发送
- 收到 Memcached 返回的包,会找到对应的 Task,调用 callback 进行回调,对返回结果进行协议的解析,并进行序列化。
sharding 机制及容错
- 路由机制:
- 实现的 HASH 算法:
- NATIVE_HASH:默认的哈希算法,计算 hashCode
- CRC_HASH:使用 crc32 进行 hash
- KETAMA_HASH:ketama 的一致性 hash
- 默认支持的两种路由策略:
- arrayMod:hash 采用的是 NATIVE_HASH,取模选择路由节点。但是取模带来了扩展性问题,导致缓存命中率降低。
- hash 采用 KETEMA_HASH,该算法选择路由节点,同时满足平衡性和单调性,有效解决了扩缩容带来的缓存不命中问题。
- 实现的 HASH 算法:
- 容错:Key 路由到的节点挂掉了的时候。如何处理?
- 自动重连:失败的节点会从正常的队列中摘除,添加到重连队列中,定期对该节点进行重连,重连成功,添加到正常的队列中
- failover 处理:
- Redistribute:若路由到一个失败节点,根据策略选择下一个节点,直到选择到正确的节点,容错性较强;但由于自动 failover 到其他节点,会导致大量回源,并且在启动的时候由于 Memcached 没有固化,导致再次大量回源。
- Retry:若路由的是失败节点,仍然用该节点访问,导致大量的访问失败。
- Cancel:如果路由的是失败节点,直接抛异常,影响缓存的可用性。
- 序列化:根据对应的数据类型,按照预先制定好的序列化规则进行序列化,序列化完了以后根据二进制数据的长度是否大于阈值,来决定是否采用 GZIP 压缩。
- 扩缩容:将对应的节点信息更新到 Zookeeper 上,应用服务器监听 ZK 节点的状态,会收到来自 ZK 节点关于新加入节点信息的通知。集群里的路由策略采用一致性哈希来保证单调性
Redis
数据结构
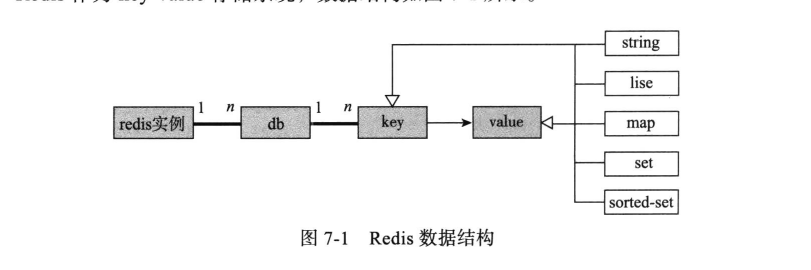
- "article:12345" - 即为 article 这个命名空间(db)下 id 为 12345 的元素的 Key
通用的数据结构
typedef struct redisObject {
unsigned type:4;
unsigned encoding:4;
unsigned lru:REDIS_LRU_BITS; /* lru time (relative to server.lruclock) */
int refcount;
void *ptr;
} robj;
- type (4 位): 2^4 = 8 > 5 可以表示八种数据类型
#define REDIS_STRING 0
#define REDIS_LIST 1
#define REDIS_SET 2
#define REDIS_ZSET 3
#define REDIS_HASH 4
- encoding (4 位): 2^4 = 8 可以表示八种编码方式
#define REDIS_ENCODING_RAW 0 /* Raw representation */
#define REDIS_ENCODING_INT 1 /* Encoded as integer */
#define REDIS_ENCODING_HT 2 /* Encoded as hash table */
#define REDIS_ENCODING_ZIPMAP 3 /* Encoded as zipmap */
#define REDIS_ENCODING_LINKEDLIST 4 /* Encoded as regular linked list */
#define REDIS_ENCODING_ZIPLIST 5 /* Encoded as ziplist */
#define REDIS_ENCODING_INTSET 6 /* Encoded as intset */
#define REDIS_ENCODING_SKIPLIST 7 /* Encoded as skiplist */
- lru:表示本对象的空转时长,用于有限内存下长久不访问对象的清理
- refcount:应用计数用于对象的垃圾回收
- ptr:指向以 encoding 方式实现这个对象的实际承载者的地址
具体的数据结构
- 对于具体的数据结构以及 Redis 自身提供的一些优化方案,此处不再赘述,后续将专门针对 Redis 的源码和实现进行具体的分析。
客户端与服务器的交互
- Redis 实例运行于单独的进程,应用系统和 Redis 通过 Redis 协议进行交互。
客户端/服务器协议
网络交互
- Redis 协议位于 TCP 之上,即客户端和 Redis 实例保持双工的连接。
- 交互的内容为序列化后的相应类型的协议数据,服务器端为每个客户端建立对应的连接,在应用层维护一系列状态保存在连接中,连接之间无相互关联。
序列化协议
- Redis 中协议数据分为不同的类型,每种类型均已 CRLF 结束,根据数据的首字符进行区分:
- Inline command:
- simple string:
- bulk string:
- error:
- Integer:
- array:
- C/S 两端使用的数据协议
请求/响应模式
串行化实现
- 同一个连接上,客户端接收完第一个请求的响应之后,再发起第二个请求。每一次的请求的发送都依赖于上一次请求的响应结果完全接收,同一个连接每秒的吞吐量低。
- 单连接的大部分时间都处于网络等待,没有充分利用服务器的处理能力。
pipeline实现
- 基于本身就支持全双工的 TCP 协议,可以将请求数据批量发送到服务器,再批量地从服务器连接的字节流中依次读取每个响应数据,极大地提高单连接的吞吐量。
- 主要由客户端来实现,通过发送批量请求或者异步化请求来实现,但非异步化批量发送时需要考虑每个批次的数据量,避免连接的 buffer 满之后的死锁。
事务模式
两阶段保证事务原子性
- 入队阶段:服务端将客户端发送来的请求暂存到连接对象的对应请求队列中。
- 执行阶段:发送完一个批次的所有请求后,服务端依次执行连接对象队列中的所有请求。
事务的一致性
- 严格意义上讲,Redis 的事务并不是一致的。由于自身并不包含回滚机制(执行到一半的批量操作必须继续执行完),在批量执行过程中有一条请求执行失败,后续继续执行,只在返回客户端的 array 类型响应中标记这条出错的结果,客户端决定如何恢复。
事务的只读操作
- 批量请求在服务端一次性执行,应用程序需要一开始就在入队阶段(未真正执行时)确定每次写操作的值,也就是说每个请求的参数取值不能依赖上一次的执行结果。
- 由于只读操作放在批量执行中没有任何意义,既不会改变事务的执行行为,也不会改变 Redis 的数据状态,所以入队的请求应该均为写操作。只读操作需要放到事务开启之前的语句执行。
乐观锁的可串行化事务隔离
- Redis 通过 WATCH 机制实现乐观锁解决上述一致性问题:
- 将本次事务所有涉及到的 Key 注册为观察模式,假设此时逻辑时间为 tstart
- 执行只读操作
- 根据只读操作的结果组装对应的写操作命令并发送到服务器端入队
- 发送原子化的批量执行命令 EXEC 试图执行连接的请求队列中的命令,假设此时逻辑时间为 tcommit
- 如果在 tstart 到 tcommit 的这段时间内,有一个或多个 key 被修改过,那么 EXEC 将直接失败,拒绝执行,否则顺序执行队列中的所有请求。
脚本模式
- Redis 允许客户端向服务端提交一个脚本,后者结构化地(分支/循环)编排业务事务中的多个 Redis 操作,脚本还可获取每次操作的结果作为下次操作的入参。使得服务端的逻辑潜入成为可能。
发布/订阅模式
- 除了上文描述的由客户端主动触发,服务端被动接收的交互模式以外,Redis还提供了一种一个客户端触发,多个客户端被动接收,通过服务器的中转的发布订阅模式。
核心概念
- 客户端分为发布者和订阅者两种角色
- 发布者和订阅者通过 Channel 进行关联
- 发布者和 Redis 的交互仍然是 请求/响应 模式
- 服务器向订阅者推送数据
- 时序:推送发生在服务器收到发布消息之后
两类 channel
- 普通 channel:订阅者将自己绑定或者解绑到某个 channel 上;发布者的 publish 命令将指定某个消息发送到哪个 channel,再由服务器将消息转发给 channel 上绑定的订阅者。
- Pattern Channel::订阅者将自己绑定或者解绑到某个 pattern channel 上;发布者的 publish 命令将指定某个消息发送到哪个 channel,再由服务器通过 channel 的名字和 pattern channel 的名字做匹配,匹配成功则将消息转发到这个 pattern channel 上的绑定的订阅者。
订阅关系的实现
- 使用了字典的数据结构维护普通 channel 和订阅者的关系,键是 channel 的名字,值是所有订阅者 client 的指针链表。
- 使用了一个来链表维护 pattern channel 和订阅者的关系
- 发布者发布消息时,首先从 channel map 中寻找到对应 channel 的所有客户端,再发送消息;再遍历 Pattern Channel 链表,向匹配到的元素的 client 发送消息。
单机处理逻辑
- 为了处理高吞吐量的访问需求,以及高并发访问,Redis 单线程地处理来自开所有客户端的并发请求来保证 hashtable 的线程安全。
多路复用

- 首先从多路复用框架中 select 出已经 ready 的 文件描述符,asApiPoll 函数的实现根据实际宿主机器的具体环境,分为四种实现方式:epoll、evport、kqueue,以上实现都找不到时使用 select 这种最通用的方式;
- ready 的标准是依据每个 fd 的 interestSet,如已有数据到达 kernel(AE_READABLE),已准备好写入数据;
- 对于上一步已经 ready 的文件描述符,redis 会分别对每个文件描述符上已 ready 的事件进行处理,处理完相同文件描述符上的所有事件后,再处理下一个 ready 的文件描述符。其事件处理逻辑根据所属场景主要分为3种实现:
- acceptTcpHandler 处理 redis 的 serverSocket 上来自客户端的连接建立请求 ,会为客户端对应的文件描述符注册其关注的事件(interestSet):AS_READABLE,以便感知该文件描述符后续发来的数据;
- readQueryFromClient 处理来自客户端的数据,它会读取每一个完整的命令并执行,再将执行结果暂存,待客户端对应文件描述符准备好写时向客户端写入。所以该方法需要为文件描述符注册 AS_WRITEABLE 事件并以 sendReplyToClient 作为处理器。对于 multi (批处理的事务),需要等到 multi 包含一个全部的命令时才进行执行;
- sendReplyToClient 将暂存的执行结果写回客户端
- 处理完来自客户端的命令之后,处理定时任务(processEvent)
- aeApiPoll 的等待时间取决于定时任务处理(TimeEvents)逻辑;
- 本次主循环完毕,进入下一次主循环的 beforeSleep 逻辑,后者负责处理数据过期,增量持久化的文件写入等任务。
定时任务处理
持久化
- Redis 对外提供数据访问服务时使用的是驻存在内存中的数据,这些数据在 Redis 重启之后将消失。为了让数据在重启之后得以恢复,Redis 具备将数据持久化到本地磁盘的能力。
全量模式
- 在持久化触发的时刻,将当时的状态(所有 db 的 key-value 值)完全保存下来,形成了一个 snapshot,重启时通过加载最近的一个 snapshot 数据,可将 Redis 恢复至最近一次持久化时的状态上。
- 故该模式可划分为写入和恢复两个流程。
写入流程
- SAVE:可以由客户端显示触发,也可以在 redis shutdown 时触发,无论以哪种形式触发,SAVE 本身都是以普通命令的方式执行——单线程地执行一个一个命令。SAVE的执行过程就是把 Redis 的当前状态写入磁盘作为快照保存的过程,期间其他所有命令不会并发执行。
- BGSAVE:客户端通过命令显示触发,可以通过配置由定时任务触发,也可以在 master-slave 的分布式结构下由 slave 节点触发。该命令执行始于 fork 出一个子线程,在子线程启动之后修改一些 redisServer 对象的状态之后执行完毕,Redis 进程的主循环接着处理后续命令。将 Redis 数据状态写入磁盘的工作由子线程并发地完成。子进程写入文件面对的是父进程在 fork 时的数据库状态副本,该副本在写入期间不会发生变更。
- BGSAVE 的优势在于可以在持久化期间继续对外提供数据读写服务,而需要付出涉及父进程内存复制的fork操作的代价,相应的会增加服务器内存的开销,当高到不得不使用虚拟内存时,BGSAVE 的 fork 会阻塞服务器运行,造成秒级以上的不可用,故在使用 BGSAVE 时需要确保内存空间足够。
恢复流程
- 从 Redis 启动到进入前文所述事件处理主循环时,Redis 会从本地磁盘加载之前持久化的文件,将内存置于文件所描述的数据”状态“时,再受理后续来自客户端的数据访问命令。
增量模式(Append-only File)
- 增量持久化保存的是状态的每一次”变迁“,在初始状态的基础之上,经过相同的”变迁“序列之后也能达到最终的状态。仅对数据的变化进行存储。
写入流程
- 在主循环中的每次处理完写命令的执行之后,通过 propagate 函数显示触发增量持久化,该方法将当前命令的内容追加到 redisServer 对象的 aof_buf 变量中,在下一次迭代进入多路复用的 select 前,通过 flushAppendOnlyFile 方法将 aof_buf 的内容写到 AOF 对应的文件中,但此时只写到了缓存,需要显示调用 fsync 强制落盘。
- 同步策略:
- alaways:在 flushAppendOnlyFile 函数中直接同步触发 fsync 方法,强制落盘。该策略会降低 Redis 吞吐量,使得磁盘的写入成为 Redis 对外写服务的瓶颈,但由于每个命令都在写入磁盘后再返回,这种模式下具有最高的容错能力。
- every second:每秒异步触发 fsync, 由 bio 线程池中的某个线程来执行。flushAppendOnlyFile 函数只是作为生产者将 fsync 任务放入队列,由 bio 线程消费执行。
- no:不显式调用,由操作系统决定什么时候落盘。该模式下,Redis 无法决定曾玲落地时间,容错能力不可控。
- 采用 every second 策略,实际吞吐量仍然与磁盘的写入能力有关。Redis 对外写服务的吞吐量仍然可能超过磁盘的写入吞吐量,否则会造成 bio 任务队列积压,为保护内存用量会限制任务队列的长度使得后续提交任务时阻塞。Reids 仍然通过阻塞来处理磁盘吞吐量低的情况,如果发现 bio 执行 fsync 的线程还在执行中的时候,是不会往队列提交任务的,阻塞发生在 write 函数上:当 bio 线程执行 fsync 时,write 方法会自然阻塞。
恢复流程
- 一旦发现存在 AOF,会选择增量恢复,通过 loadAppendOnlyFile 方法恢复数据,将 AOF 中保存的命令重新执行一遍。
优化
- 由于采用了追加写的方式,AOF文件会越来越大,占用大量的磁盘空间,同时降低了恢复加载效率,于是 Redis 通过 rewrite 机制合并历史 AOF 记录。
- 该机制针对增量写过程中 AOF 文件大于某个状态的快照文件大小时,此时使用快照代替增量,以减少磁盘空间占用。快照采用 cmd 形式来承载,即将快照中的所有 KV 键值对用插入命令来表示,从而保证快照文件和普通的 AOF 文件一致,从而复用相同的加载逻辑来统一处理 Redis 启动时的数据恢复。
- 实现:定时任务定期检查是否满足 rewrite 条件,满足的话 fork 一个子进程,创建完成后获得 Redis 主进程的数据状态,写入 rewrite的AOF文件,子进程运行期间,Redis 主进程继续对外提供服务,新的增量写入到 redisServer 对象的 aof_rewrite_buf_blocks 中,待子进程完成后,将增量内容追加到 rewrite 的快照文件末尾,再后续的增量,会写入新的 AOF 中。
- 历史 AOF 文件:快照形式保存,仍然使用 CMD 插入命令保存;
- 快照写入期间的增量:待快照写入完成后追加到快照文件末尾;
- 后续增量:写入到新的 AOF。
分布式 Redis
- 单实例节点在实际应用中可能面临的问题:
- 数据量伸缩:面对存储容量达到瓶颈时,作为缓存可以利用 key 的过期淘汰机制从而控制容量;但作为 NoSQL 时,业务数据长期有效时淘汰机制不再适用。
- 访问量伸缩:单实例 Redis 单线程运行,吞吐量受限于单次请求处理的平均时耗。
- 单点故障:持久化机制一定程度上解决了单点故障的问题,但由于单实例部署,在发生不可恢复故障时,如何保证业务数据不丢失以及恢复机制成为了挑战。
- 解决方案(对于数据存储系统而言通用的解决方案):
- 水平拆分:分布式环境下,节点分为不同的分组,每个分组处理业务数据的一个子集,分组之间数据无交集。数据无交集的特性使得水平拆分解决了数据量瓶颈,可以通过增加减少分组来伸缩数据量,同时也解决了访问量瓶颈,吞吐量也会随着分组的增加而增加。
- 主备复制:同一份业务数据存在多个副本,对数据的每次访问根据一定规则分发到某一个或者多个副本上执行。通过 W + R > N 的读写配置可以做到读取数据内容的实时性,随着N的增加,当读写访问量差不多时,业务的吞吐量相比单实例会提升到逼近2倍。但实际中,读的访问量常常远高于写的量,W=N,R=1,吞吐量会随着读写真的增加而提升。
- 故障转移:业务数据所在节点发生故障时,这部分业务数据转移到其他节点上进行,使得故障节点在恢复期间,对应的业务数据仍然可用。所以需要保证业务数据保持多个副本,位于不同的节点上。
水平拆分
数据分布
- 数据分布指的是一种映射关系f,每个业务数据 key 都能通过映射关系确定唯一的实例。主要取决于 Redis 客户端。
hash 映射
- 将不可控的业务值域 key 映射到可控的有限值域(hash 值)上,且映射做到均匀,再将有限的均匀分布的 hash 值枚举地映射到 Redis 实例上。例如
crc16(key) % 16384这个 hash 算法将 key 映射到 0~16383 的有限整数集合上,再依据一定的规则将整数集合的不同子集不相交地划分到不同 Redis 实例上,以实现数据分布。
范围映射
- 选择 key 本身作为数据分布的条件,且每个数据节点存放的 key 的值域是连续的一段范围。如 0 <= key < 100 时,数据存放到实例 1 上;100 <= key < 200 时,数据存放到实例 2 上,以此类推;key 的值域由业务层决定,业务层需要清楚每个区间的范围和 Redis 实例数量才能完整地描述数据分布,使得业务域的信息(key 的值域)和系统域的信息(实例数量)耦合,数据分布无法在纯系统层面实现,从系统层面来看,业务域的 key 值域不确定,不可控。
hash 和范围结合
- 典型的方式是一致性哈希,首先对 key 进行计算,得到值域有限的 hash 值,再对 hash 值做范围映射,确定该实例的具体存放实例。
- 该方式的优势在于节点新增或减少时,涉及的数据迁移量小——变更的节点上涉及的数据只需要和相邻节点发生迁移关系;缺点是节点不是成倍变更(数量变成原有的 N 倍或者 1/N)时,会造成数据分布的不均匀。
请求路由
- 根据请求中涉及到的 Key,用对应的数据分布算法得出数据位于哪个实例,再将请求路由至该实例。需要关注数据跨实例的问题。
只读的跨实例请求
- 将请求中的多个 Key 分别分发到对应实例上执行,再合并结果。其中涉及语句的拆分和重生成。
跨实例的原子读写请求
- 事务、集合型数据的转存操作(ZUNIONSTORE),向实例 B 的写入操作依赖于对实例 A 的读取。单实例情况下,Redis 的单线程特性保证此类读写依赖的并发安全,而在跨实例情况下,存在跨节点读写依赖的原子请求是不支持的。
- 在 Redis Cluster 之前,通常通过 proxy 代理层来处理 sharding 逻辑,代理层可以位于客户端本身(如Predis),也可以是独立的实例(如 Twemproxy)
主备复制
- Redis 采用主备复制的方式保证一致性,即所有的节点中,有一个主节点 master 它对外提供写入服务,所有的数据变更由外界对 master 的写入触发,之后 Redis 内部异步地将数据从主节点复制到其他节点 Slave 上。
主备复制流程
- Redis 包含 master 和 slave 两种节点:master 节点对外提供读写服务,slave 节点作为 master 的数据备份,拥有 master 的全量数据,对外不提供写服务。主备复制由 slave 主动触发,主要流程为:
- slave 向 master 发起 SYNC 命令,这一步在 slave 启动后触发,master 被动地将新 slave 节点加入自己的主备复制集群;
- master 收到 SYNC 后,开启 BGSAVE 操作。BGSAVE 是 Redis 的一种全量模式的持久化机制;
- BGSAVE 完成后,master 将快照信息发送给 slave;
- 发送期间,master 收到来自用户客户端新的写命令,除了正常地响应以外,再存入一份到 backlog 队列;
- 快照信息发送完成后,master 继续发送 backlog 队列信息;
- backlog 发送完成后,后续的写操作同步发给 slave,保持实时地异步复制;
- Slave 端的主要操作为:
- 发送完 SYNC 命令后,继续对外提供服务;
- 开始接收 master 的快照信息,此时,将 slave 现有的数据清空,并将 master 快照写入自身内存;
- 接收 backlog 内容并执行它,即恢复操作,期间对外提供读请求;
- 继续接收后续来自 master 的命令副本并继续恢复,以保持数据和 master 一致。
- 有多个 slave 节点并发发送 SYNC 命令时,如果第二个 slave 的 SYNC 命令发生在 master 的 BGSAVE 之前,那么第二个 slave 将收到和第一个 slave 相同的快照和后续 backlog;否则,第二个 slave 的 SYNC 命令将触发 master 的第二次 BGSAVE。
断点续传
- 每次 Slave 节点向 master 发起同步(SYNC)指令来同步数据时,master 都会 dump 全量数据并发送给 Slave。当一个 Slave 已经和 Master 完成了同步操作并持续保持了长时间,突然网络断开很短的一段时间再重新连接,Master 不得不做一次全量的 dump 的传送,然而由于只是断开了很短的时间,重连之后 master 和 slave 的差异数据较少,全量 dump 数据的绝大部分在 Slave 中已有,故只需要同步连接断开期间的少量数据即可。
- Redis 针对断点续传场景提出了 PSYNC 的命令来替代 SYNC,做到 Master-Slave 基于断点续传的主备同步协议。在两端通过维护一个 offset 记录当前已经通不过的命令,slave 断开期间,master 的客户端命令会保持在缓存中,当重连之后,告诉 master 断开时的最新 offset,master 则将缓存中大于 offset 的数据发给 slave,而断开前已经同步过的数据,则不需要再重新同步,减少了数据的传输开销。
故障迁移 Failover
- Failover:在具有主备关系的实例组成的集群中,当 master 故障时,slave 可以成为新的 master,对外提供读写的服务。
- 主要问题:谁去发现 master 的故障做 failover 的决策?
- 保持一个守护进程,监控所有的 master-slave 节点。(无法保证守护进程本身的可用性)
- 保持多个守护进程,同时监视所有的 master-slave 节点,解决了可用性问题,但带来了一致性问题:多个守护进程,如何就某个 master 是否可用达成一致
- Redis 的 sentinel 提供了一套多守护进程间的交互机制,解决故障发现、故障迁移决策协商机制等问题。多个守护进程组成了一个集群,成为 sentinel 集群,其中的守护进程也被称为 sentinel 节点,节点间互相通信、选举、协商,在 master 节点的故障发现、故障迁移决策上表现出一致性。
sentinel 节点间的相互感知
- 守护进程集群中需要互相感知的节点,都向他们共同的 master 节点订阅相同的 channel:
__sentinel__:hello,新加入的节点向该 channel 发布一条信息,该信息包含了自身的一些信息,该 channel 的订阅者们(其他节点)就可以发现这个新加入的节点,从而新加入的节点和已有的其他节点建立长连接。集群中的所有节点保持两两连接。
master 的故障发现
- sentinel 节点通过定期地向 master 发送心跳包判断其存活状态(PING),一旦发现 master 没有正确地响应,sentinel 节点将此 master 置为“主观不可用态”。(该判定还未得到其他节点的确认)
- 随后将该状态发送给其他所有节点进行确认,当确认的节点数达到一定的阈值(quorum)时,则判定该 master 为客观不可用,随后进入故障迁移流程。(该阈值可配置)
故障迁移决策
- 可能存在多个 sentinel 节点同时发现 master 的不可用问题并同时通过交互确认了客观不可用的状态,同时打算开始故障迁移流程,此时需要进行选举操作来决定唯一的故障迁移发起者。
- Redis 的 sentinel 机制采用了类似 Raft 协议实现了选举算法:
- sentinelState 的 epoch 变量类似于 Raft 协议的中 term(选举回合);
- 每一个确认了 master 的客观不可用态的节点向周围广播自己参选的请求;
- 每一个接收到参选请求的节点,如果是第一次接收到参选请求,就将该请求对应的节点置为本次选举回合的意向节点并回复它,如果已经给出了回复,将拒绝本回合的其他请求;
- 参选者如果收到了超过一半的意向同意回复,则确定该节点为leader。如果持续了足够长时间还会竞选出leader,开始下一个回合。
- leader sentinel 节点选取出来之后,由 leader 决定根据一定的规则从 master 所有的 slave 中选取一个新的节点作为 master,并告知其他 slave 节点连接这个新的 master。
Redis Cluster
- Redis 3.0 之后,通过去中心化的方式提供了完整的 sharding、replication(复制机制仍复用原有的机制,只是 cluster 具备感知主备的能力)、failover解决方案,称为 Redis Cluster,即将 Proxy/Sentinel 的工作融合到了普通的 Redis 节点里。
拓扑结构
- 一个 Redis Cluster 由多个节点组构成,不同节点组的数据无交集,即每一个节点组对应数据 sharding 的一个分片,节点组内部分为主备(1个Master,0-N个Slave)两类节点,两者通过异步化的主备复制保证准实时一致。
- Redis Cluster 中的各个节点之间,两两通过 Redis Cluster Bus 交互,交互以下关键信息:
- 数据分片 slot 和节点的对应关系;
- 集群中每个节点的可用状态;
- 集群结构(配置)发生变更时,通过一定的协议对配置信息达成一致;(数据迁移,故障迁移,单点master发现和主备变更等行为)
- 发布订阅功能内部实现所需要交互的信息。
- Redis Cluster Bus 通过单独的端口连接,交互字节序列化信息,在内部进行通信,效率较高,相比于 Client 到 Server 的字符序列化传输。
- Redis Cluster 是一个去中心化的分布式实现方案,客户端可以和集群中的任一节点连接,根据某个节点在集群中的交互流程,逐渐获知全集群的数据分片映射关系。
配置的一致性
- Redis Cluster 通过引入两个自增的 epoch 变量来保证集群中各个节点配置信息保持最终一致
配置信息的数据结构
- clusterState:单个节点的视角看集群的配置状态
currentEpoch; //整个集群的最大版本号
nodes; //包含了本节点所知的集群中的所有节点的信息
stateOne; //分片迁移状态
failoverState;//failover状态
- clusterNode:记录了每个节点的信息
nodeId;
epoch; //该信息的版本号
slots; //该节点对应的数据分片
slaves;
master;
ip:port;
state;
type;
信息交互
- 由于不存在统一的配置中心,各个节点对集群的认知来自于节点信息间的交互,通过内部通信机制 Redis Cluster Bus 完成。
- clusterMsg
type; // 消息类型 PING/PONG
epoch; // epoch版本号相关
senderNodeId;
senderSlots;
gossip; // 消息体
- clusterMsgDataGossip
nodeId;
ip:port;
state; // 类型状态
- Gossip 协议中,每次PING/PONG包只包含全集群的部分节点信息,节点随机选取,以此控制网络流量,由于交互较为频繁,短时间的几次交互之后,集群状态以这样的Gossip协议方式被扩散到了集群中的所有节点。
一致性的达成
- 当集群结构不发生变化时,可以通过 Gossip 协议在几轮交互之后得知全集群的结构信息,达到一致的状态。
- 在集群结构发生变化时,只能由优先得知变更信息的节点利用 epoch 变量将自己的最新信息扩散到集群,达到最终一致。
- Redis Cluster 在集群结构发生变化时,通过一定的时间窗口控制和更新规则保证每个节点看到 currentEpoch 是最新的。
- 集群信息更新遵循的规则:
- 某节点率先知道信息变更,该节点将 currentEpoch 自增使之成为集群中的最大值,再利用自增后的 currentEpoch 作为新的 epoch 版本
- 某个节点收到比自己大的 currentEpoch 时,更新自己的 currentEpoch 值使之保持最新;
- 收到 Redis Cluster Bus 消息里某个节点信息的 epoch 值大于接收者自己内部配置信息的存储的值时,将自己的映射信息更新为消息的内容;
- 收到 Redis Cluster Bus 消息里某个节点信息未包含在接受节点的内部配置信息时,意味着接收者尚未意识到消息所指节点的存在,此时接收者直接将消息的信息添加到自己的内部配置信息中。
sharding
数据分片 slot
- 数据分布算法:
slotId = crc16(key) % 16384 - 针对关联性较强但可能分散到不同节点的数据,Redis 引入了 HashTag 的概念,使得数据分布算法可以根据 Key 的某一部分计算,让相关的两条记录落到同一个分片,例如(根据{}内的数据作为分布算法的输入):
- 商品交易记录:
product_trade_{prod123} - 商品详情记录:
product_detail_{prod123}
- 商品交易记录:
客户端路由
- Redis Cluster 的客户端具备路由语义的识别能力,且具备一定的路有缓存能力。当一个 client 访问的 key 不在对应 Redis 节点的 slots 中,Redis 返回给 client 一个 moved 命令,告知正确的路由信息。收到 moved 之后,client 端继续向新的 slot 发起请求,但仍然可能不是最新的节点,继续返回 moved,同时客户端更新本地路由缓存,以便下一次直接访问到正确的节点,减少交互次数。
- 针对数据重分布场景,未命中时服务端通过 ask 指令控制客户端的路由。相比于 moved 的不同之处在于,ask 只重定向到新节点,不更新客户端的路由缓存。避免路有缓存信息发生频繁变更。
分片的迁移
- 节点和分片的映射关系可能发生变更:
- 新节点作为 master 加入
- 某个节点分组需要下线
- 负载不均衡需要调整 slot 分布
- 分片迁移的触发和过程控制由外部系统完成,Redis Cluster 只提供迁移过程需要的原语供外部系统调用。
-
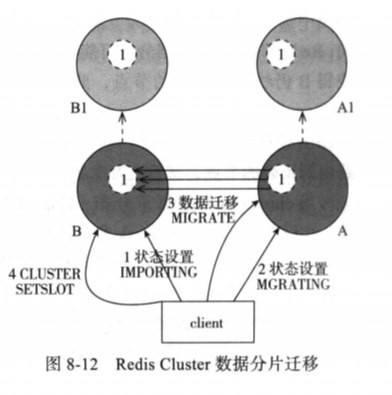
针对迁移过程中的数据处理:
- 访问 A 节点中的尚未迁出的 key,正常处理;
- 访问 A 节点中的已经迁移出或者不存在的 Key,回复客户端 ASK 跳转到 B 执;
- B 节点不会处理非 ASK 操作重定向而来的请求,通过 MOVED 指令让客户端跳转到 A 执行。
-
MIGRATE 为原子操作,单线程处理,保证了某个 Key 迁移过程中的一致性;
-
CLUSTER SETSLOT 设置 B 的分片信息,使之包含 A 的 slot,设置过程中自增 epoch,将配置信息更新到整个集群,完成分片节点映射的更新
failover
故障发现
- Redis Cluster 的节点之间通过 Redis Cluster Bus 两两周期性地进行 PING/PONG 交互,当某个节点宕机时,其他发向它的 PING 消息将无法及时响应,当超过一定时间(NODE_TIMEOUT)未收到 PONG 响应,则发送者认为该节点故障,置为 PFAIL 状态。
- 针对可能产生误报的情况,在 NODE_TIMEOUT/2 过去了却还未收到 PONG,重建连接发送 PING 消息,若对端正常将会在很短的时间内抵达。
故障确认
- 集群中的每个节点都是 Gossip 协议的接收者,当 A 与 B 节点无法连接时,A 将 B 置为 PFAIL,A 持续的通过 Gossip 接收关于来自不同节点发送的 B 节点的状态信息,当 A 收到的来自 master 的 PFAIL 累积到一定数量时,PFAIL 会变为 FAIL,后续发起 Slave 选举。

Slave选举
- 当存在多个 Slave 同时竞选 master 的情况时,需要在选举前进行优先级的协商。根据 Slave 最后一次同步 master 信息的时间来决定优先级,时间越新,优先级越高,更有可能更早地发起选举。
- 竞选投票的过程与之前的 Redis Failover 中保持一致。
结构变更通知
- 选举成功(收到超半数的同意时),新 master 节点以最新的 Epoch 通过 PONG 消息广播自己成为 master 的信息,并让集群节点尽快更新集群拓扑信息。
可用性和性能
- Redis Cluster 提供了一些手段提升性能和可用性
读写分离
- 针对有读写分离的需求的场景,读请求交由 Slave 处理,舍弃一定的数据一致性,换取更高的吞吐量。
- 由于每个 Slot 对应的节点一定是个 master 节点,客户端的请求只能发送到 Master 上,即便是发送到了 Slave,后者也会回复 MOVED 定向到 Master 上。为此提供 READONLY 命令,客户端直接向 Slave 发起该命令时,不再回复 MOVED 而是直接处理。
master 单点保护

- 当 A1 节点宕机时, A 节点作为 master 将成为单一节点,为了保证高可用性,会将 B 节点的其中一个 Slave 进行副本迁移,使其成为 A 节点的 Slave。
- 故集群中至少保证
2*master + 1个数据节点,就可以保证任一节点宕机后仍然能自动地维持高可用的状态,称为 master 的单点保护。若无该机制,则需要维持3*master个节点。
